
自动驾驶百度华为到底哪家强,和对未来技术发展的推演
本文着重对比分析百度华为的自动驾驶技术到底哪家厉害,顺带推演未来自动驾驶的发展路径。因为资料有限,我只能从我能观察到的角度和理解来进行对比,尽可能的推断真相。
上海车展前华为发布了一个自动驾驶测试视频,引起了轰动,掀起了一轮自动驾驶讨论的热潮。华为自动驾驶的技术从视频展示的效果来说,确实很强,基本可以胜任复杂道路的驾驶,从观感冲击力上说是世界第一并不为过。
华为自动驾驶视频1
还有夜晚的测试视频:
华为自动驾驶视频2
但在大家惊叹华为不鸣则已,一鸣惊人的同时,这个视频也引起了不少质疑。质疑首先来自一个华为前员工网上的评论:
当然,还有友商们像百度apollo,美团王兴等不知道是不屑还是嫉妒的冷嘲热讽。
如此冲突的信息就让我们吃瓜群众陷入迷茫,到底华为自动驾驶的实力如何。为什么很少听到宣传的华为自动驾驶出道即巅峰了,那个all in AI 已八年的百度的自动驾驶技术到底如何呢?
作为一个强烈看好并一直关注自动驾驶的技术宅,我便在网上查找了大量的资料,和视频对比。这里插入两段百度的自动驾驶视频:
百度自动驾驶视频1
百度自动驾驶视频2:https://www.bilibili.com/video/BV1bK4y1P7Ba?from=search&seid=5910645406519573135
说华为前,我想先分析下百度apollo的自动驾驶目前发展水平。apollo以前的robotaxi是不让在车内拍摄的,但在华为的自动驾驶视频后,紧急邀请媒体测试了一波,高调发布了很多自动驾驶的视频出来。我看了大部分网上能找到的apollo的自动驾驶视频,从吃瓜群众的角度,观感上来说,确实不如华为的厉害。主要是两点,1 测试道路不够复杂 2 自动驾驶表现出来效果一般。
比如上面的百度自动驾驶视频2,我看的提心吊胆,真坐这样的自动驾驶车,心脏病都能吓出来。并不复杂的道路上,蹭到路边摆放的锥桶,检测不到行人等危险情况时有发生。
但是百度apollo的水平真的这么不堪吗?仔细观察的话,你会发现。apollo的测试视频其实能看到的有3种:
Rotaxi无人出租车
威马w6 apollo纯视觉完整方案 (上面视频1)
威马w6 量产**版 (上面视频2)
能吓死人的主要是威马w6的量产**版。w6的apollo完整版的视频,其实从道路复杂度,还有应对来说看着还是可以接受的。威马w6的量产版主要**了哪些方面呢,我网上查了下,主要是摄像头减配了,少了两个翼子板摄像头和两个车顶摄像头,中央处理器也降级了。但是观众其实并不清楚这一点,普遍以为威马w6量产版就是apollo的完整实力,再加上百度向来名声不好,所以评论里被喷得体无完肤。从这里可以看出,百度的营销能力真的是十分堪忧。
两个版本的威马w6上,无论**版还是完整版,都用的是百度的纯视觉方案ANP。纯视觉方案主要就是指依赖摄像头来判断,不使用激光雷达。
自动驾驶方案里面,最主要的就是传感器的识别,识别红绿灯,路上的物体,行人车辆车道。如果能够正确识别这些东西的话,车辆的行为决策并不是难点。其实自动驾驶车辆,路试数据几百万几千万的里程里,最重要的就是用神经网络训练车辆的视觉识别。从上面的几个视频看,我认为这个方面百度还是领先的。视频1是我见过的纯视频方案中,效果第一梯队的。纯视觉能做到这种程度,按目前的技术水平来说已经非常不错了。
固定道路的信息,可以用高精地图来辅助,这样就可以减少计算量,百度和华为都有用到高精地图来辅助。这方面百度也是领先的,毕竟百度地图积累的时间更久。
接下来我们看看另一个非常有争议的传感器,就是激光雷达。特斯拉的马斯克很早就给激光雷达判了死刑,他觉得用激光雷达的是傻子。利用第一性原理,摄像头能看到人类能看到的一切,那就最终能实现人类一样的自动驾驶能力,不需要昂贵的激光雷达。
那激光雷达到底有没有用呢?首先我们来看下激光雷达到底能看到什么:
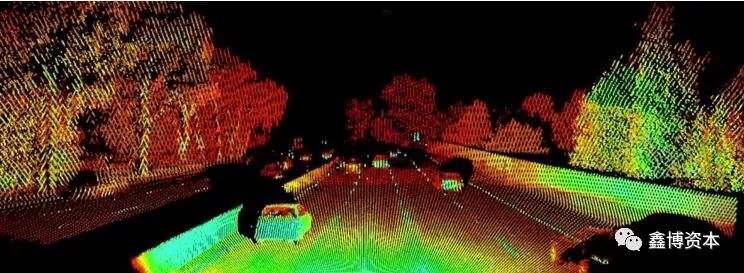
这就是激光雷达的点云图。激光雷达可以非常准确的进行障碍物测距。精确的告诉你周围有什么物体,距离多远。从这张点云图,其实不难看出,有了激光雷达,再融合视觉方案,感知识别物体就变得相对容易的多。而一旦周围环境和物体能够准确识别,自动驾驶的策略就相对容易了。
用激光雷达的效果到底怎么样呢?这时候我们回过头来看华为。华为的方案就是在视觉+高精地图的基础上,增加了激光雷达。结果显然是很惊艳的,表现出来的就是自动驾驶系统明显比纯视觉方案们更有信心,处理复杂场景更得心应手。
从我个人的观察来说,我认为华为的自动驾驶能力的惊艳效果很可能主要是来自激光雷达的加持。依赖激光雷达为主的话,就不需要进行过多的道路测试,因为大量的数据,主要的用途是用来训练摄像头视觉的识别嘛。如果激光雷达的数据以后,甚至我觉得都不要依赖神经网络进行训练,这就解释了上面前华为员工说的华为写死规则的事情。传感器足够强大的话,自动驾驶的行为直接通过写无数条规则来实现,确实是一个很快速有效的解决方案。比如探测到离前方障碍物多少距离的时候停止,怎么绕开障碍物等。和编一个游戏没有什么区别了。但这种驾驶能力肯定不像前员工说的无法泛化,只要传感器够强大,精确的告知周围环境的情况,还是可以泛化的。
当然百度也有激光雷达方案,就是apollo无人出租车robotaxi。robotaxi车顶上的大帽子就是激光雷达。

robotaxi实际上已经在很多城市运行了,已经可以做到L4级别无人驾驶。从网上我能找到的robotaxi视频看,做到L4级别的能力差不多有了,但是硬伤是,视频里的道路路况都相对简单。百度并没有发布复杂路况的robotaxi的视频。所以是不是能在复杂路况下做到L4级别的能力,有待观察。

小马智行的无人车在广州晚高峰全自动驾驶1小时实录,不间断、无干预!快来看看国产无人车的骚气操作吧!关注@智猩猩 接收AI与硬核科技知识 #自动驾驶
视频号
如果对比激光雷达方案的话,我们可以看到小马智行的自动驾驶能力也很强了。这也可以从另一方面验证,依赖激光雷达的话,自动驾驶的壁垒并没有很高。
综上来说,我认为百度对比华为,很有可能百度在自动驾驶上的技术积累应该更厉害些。毕竟华为没有纯视觉方案的试驾视频,而这是最难的。apollo不但是个开源平台化的产品,还是模块化设计,可以根据需要,变成雷达方案,纯视觉方案,甚至可以引入第三方的雷达,或者计算模块。
但百度在商业化能力上真的做的非常差,到目前为止,和百度合作推出ANP量产车的还只有威马这个**丝车厂,为了点成本,把完整版的ANP还**了,多几个摄像头,用好点的芯片能增加多少成本?没有追求。百度在营销推广水平能力也非常堪忧,apollo到底什么水平,大部分消费者肯定都一头雾水,没有产品辨识度。反而被华为后发制人抢得先机。
华为只有激光雷达版本,和从各方面的反馈看,积累可能还不够,以至于很多自动驾驶领域的都表示不屑。但是从营销的角度,和工程能力上来说,华为显然是非常成功的。首先营销方面,一个视频放出,就瞬间登顶。而且惊艳的视频加上华为历来的技术口碑,能为华为后来居上,抢占车厂合作的入口提供很好的战略卡位。
这里插一句,智能汽车自动驾驶解决方案,最终这些解决方案提供商们厮杀的战场就是抢占车厂合作,谁抢占的多,谁最后赢面就大。毕竟这是一个to B的业务,而且整车厂本来就没几家。其中还有不少厂家不肯放弃核心技术,希望自己做全套解决方案,像蔚来,特斯拉,小鹏,理想等新势力。所以这里的竞争会非常激烈。也难怪华为的一个牛x自驾视频会引起友商们巨大的反应,用他们的话讲就是不讲武德。百度apollo显然在这方面进展不够顺利的,不然又何必自己下场和吉利合作造车呢。
再说工程能力上,激光雷达,我们知道最大的痛点是成本高,百度robotaxi车顶的一套激光雷达是大几十万上百万的成本,根本无法放到民用量产车上。华为能率先把激光雷达放到量产车上(虽然极狐上目前用的并不是华为的激光雷达),本身就是一个很大的突破。值得点赞。
激光雷达对比视觉方案,这里我再补充一点技术方面的想法。其实激光雷达目前也不是无敌的。因为激光雷达也有一定的技术指标,就是我们看到的华为极狐就是用的96线的,这是分辨率。目前业界最高的能做到300线。还有一个探测距离,不知道极狐目前探测距离多远,目前lazr的激光雷达可以做到300线,500米。极狐的96线激光雷达,不管探测距离多少,这个分辨率,距离远了是无法有效分辨物体的。所以这个激光雷达,在低速下使用没有问题,可以解决市区拥堵路段,中低速下的探测。也就是华为视频发布中的使用场景。但是我相信这个激光雷达几乎无法在高速上使用。高速上因为车速快,要求探测距离达到500米才能有效保证安全。
视觉方案理论上,因为第一性原理,可能是最终的廉价解决方案(但是无论视觉方案多先进,激光雷达永远可以作为冗余保障)。但是那也只是理论上,目前可见的未来,这都太难了。说理论的话,人工智能最终会取代人类的。但目前限于人类的科技发展水平,我们离理想的理论水平还远的很。
视觉方案辨别物体距离目前是通过双目摄像头视差测距,在简单场景,远距离测距上,比较容易做到。所以我们可以看到特斯拉,蔚来们基于视觉方案的NOP,NOA自动驾驶演示无不是在高速场景中,这是视觉方案的目前比较容易实现自动驾驶的场景。目前这些方案到了市区复杂场景,就很容易因为测距误差,还是复杂物体识别问题抓瞎。
所以依赖纯视觉方案,在当前的技术下,只能实现相对低级别的自动驾驶辅助。在当下的解决方案中,一个低成本300线500米探测距离的雷达,完全有能力降维打击目前的纯视觉方案。纯视觉方案在可见的未来中,我认为都很难保证高级别自动驾驶的安全性。因为基于神经网络训练的图像识别,总是非常容易受到意外的情况和干扰。应用在非安全相关领域容错比较高的场景可以接受,但要实现L4,L5级别的自动驾驶,一旦出错就是性命攸关(之前美国特斯拉自动驾驶高速撞白色卡车的事件就是视觉方案失效造成的事故),还是非常难。
就是说,特斯拉,百度,mobileye等先发厂商积累的基于大量里程数训练出来的视觉方案的优势,很可能被后发的厂商们用更先进(300线,500米)且低成本的激光雷达方案,短时间内大幅缩小差距。当然如果是这样的话,特斯拉大几千亿的估值基于的其中一个假设,自动驾驶大幅领先同行,在robotaxi中独占先机这点就会被证伪,这个需要到明年雷达方案大规模上市后验证。为特斯拉小担心下。
综上,从我的观察,我认为百度自动驾驶在综合能力和积累上很有可能还领先于华为,华为在激光雷达方案和工程落地上领先百度。自动驾驶技术目前由特斯拉,mobileye主导的纯视觉方案,接下来很有可能会被激光雷达+视觉融合的方案在自动驾驶能力上超越,而且很长一段时期内,要实现自动驾驶激光雷达都必不可少。甚至未来视觉方案非常成熟后,由于安全冗余角度的考虑,在高档车上,也不太可能完全抛弃激光雷达来实现自动驾驶。
从自动驾驶的时间维度上,我个人判断,硬件性能满足L4无人驾驶条件的车辆2022年底可大量上市,2025年左右,软件迭代可基本实现L4级别无人驾驶。
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
