
自动驾驶NO.1竟然不是特斯拉
每位特斯拉车主,都要时刻提防迎面而来的大货车
从老司机开车说起
提到自动驾驶,很多人的第一反应就是特斯拉。2019年,美国性从业者杰克森(Taylor Jackson)和其男友驾驶特斯拉时,开启了自动驾驶模式,解放了双手双脚的二人,便在车内上演了激情大戏,拍摄了一部A片并上传到Pornhub。
这个视频的效果,用杰克森自己的话说就是“让特斯拉登上了PornHub热搜第一名”。实际上效果不止于此,整个互联网圈基本传遍了。真是“十年研发无人晓,AV路测天下知”。甚至惊动了特斯拉创始人马斯克,可能马斯克对这个视频引发的广告效应非常满意,所以他也幽默地在推特上调侃:“原来自动驾驶还有这么多我们无法想像的用途”。
2014年10月,特斯拉就推出了第一款可实现辅助驾驶的车型——Model S P85D,这也可以算作其在自动驾驶领域的开端。虽然特斯拉并不能算作自动驾驶领域的先驱,但却是迄今为止在这个领域商业化最成功的公司。
也正是得益于特斯拉近几年在商业上的成功,越来越多的整车制造企业及创业团队也先后进入新能源汽车领域。与此同时,诸多互联网巨头、AI公司看到智慧车载系统和自动驾驶的前景,也纷纷入局。一时间,从事自动驾驶技术开发的公司就如雨后春笋般涌现:
在这些公司中,名气最大的当属新能源王者特斯拉。此外还有以尼桑和奔驰为代表的传统整车厂商;以蔚来、小鹏和理想为代表的新能源新势力;另外还有一些专注于研发自动驾驶技术的互联网公司,比如谷歌旗下的Waymo,百度的Apollo、以及国内新秀Pony.AI(小马智行)。
在诸多开发自动驾驶技术的国内公司中,谁又是做的最好的那个呢?回答这个问题前,我们先回顾一下自动驾驶的概念和技术原理(答案就藏在介绍中):
自动驾驶等级划分
可能很多人对L4级别的自动驾驶还没什么概念,这里先科普一下:目前汽车界一致认同SAE(美国机动车工程师学会)的自动驾驶等级划分:
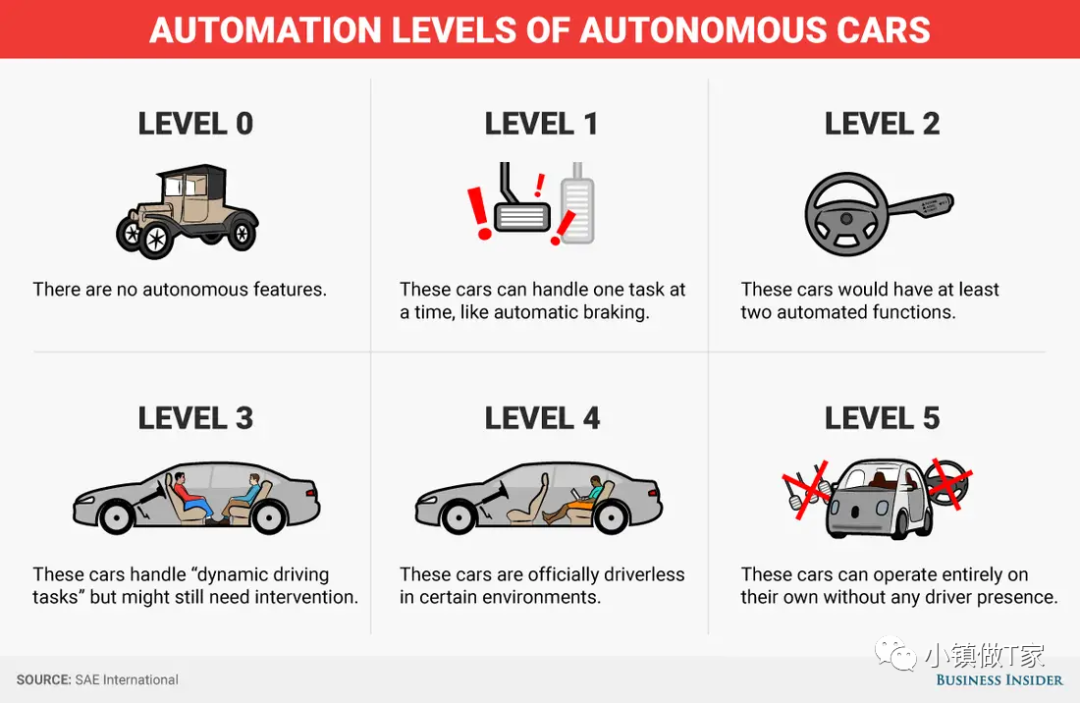
L0:无任何自动化
车辆完全由驾驶员掌控,驾驶员拥有绝对控制权,且车上不存在任何的自动驾驶技术。
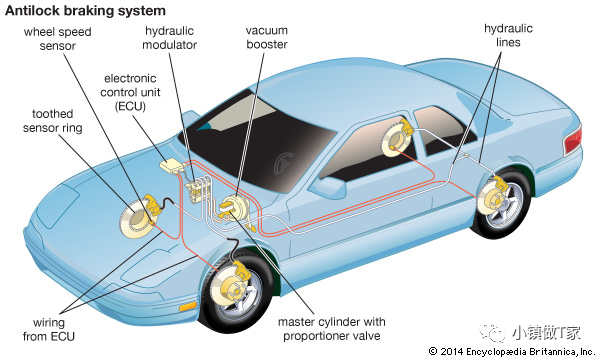
准确来说,现在我们已经很难看到 Level 0 的汽车了。这些汽车要么早已报废,要么法规都禁止其上路了。因为无自动化意味着诸如ABS(自动防抱死)这种现在看来最基本的配置都没有。L0要求人车高度合一,在操控上不能有任何闪失。
L1:驾驶员辅助
驾驶员依然需要去驾驶车辆,只不过出现了像ACC自适应巡航、自动刹车等安全系统,对驾驶员的驾驶起到一个辅助的作用,但驾驶员的手还是不得离开方向盘,眼不得离开周围路况。
比如最基本的ABS(防抱死制动系统),以及在ABS基础上升级而来的ESP(车身电子稳定系统),还有高速路段常用的定速巡航、ACC自适应巡航功能及LKA车道保持辅助。
生活中常见的车基本都属于L1。L1 称为驾驶员辅助系统,所有在驾驶员行驶过程中,对行车状态有干预的功能都叫驾驶员辅助,都属于L1。
L2:部分自动化
来到L2这个级别,自动驾驶技术就可短暂接管一些驾驶任务,眼和手可短暂获得休息。但是驾驶员仍需做好随时接管驾驶任务的准备,因为还不足以应对变化的交通路况。
L2和L1最明显的区别是系统能否同时在车辆横向和纵向上进行控制。比如拥有高速自动辅助驾驶、拥堵自动辅助驾驶、自动泊车和自动紧急制动等功能。L2等级是目前市面大多新车型搭载的自动驾驶系统。
如果一个车辆能同时做到ACC+LKA(自适应巡航+车道保持辅助),那么这辆车就跨进了L2的门槛。比如2018款的凯迪拉克CT6拥有的半自动驾驶系统“Super Cruise”就是典型的L2级别。虽然它能实现单一车道内的加减速,不过还无法做到主动超车。
目前采用“低成本感知+高性能计算”自动驾驶方案的特斯拉可以算为Level2.5。
因为特斯拉具备换道功能(换道超车)。驾驶员在确保安全的情况下,拨动转向灯杆,车辆即可依据该信号实现换道。也就是说,特斯拉的换道操作并不是全自动的,而是把这一块对环境感知的需求交给了人。特斯拉收到变道信号后会由车辆判断是否可安全变道后才会执行。比如前后车距离太近、实线都不会变道的。
L3:有条件自动驾驶
来到这个级别,在某种意义上就可以算作自动驾驶,也可以把这个级别称为真正自动驾驶的开端。驾驶员可以将手离开方向盘,脚离开踏板,车辆几乎可以独立完成全部的驾驶操作。理论上可以刷刷微博玩玩手机啥的,但驾驶员还是要有意识的去随时接管驾驶任务。目前唯一达到L3级别车型是奥迪A8:
但是,L3的自动驾驶是有条件限制的。比如全新奥迪A8在他们的宣传视频中就限定了十分常见的场景——堵车。对于堵车,奥迪给出的定义是≤60公里/小时的速度。在堵车情况下,并且在当地法律允许的情况下,车辆会完全接管驾驶任务,直到系统通知用户再次接管。这也是目前在全球范围内,在实现量产的车型中拥有的最高级别的自动驾驶能力。
稍后我们再继续介绍奥迪A8是如何实现L3级别自动驾驶的。
L4:高度自动驾驶
L4可以说是真正意义上的自动驾驶,不需要驾驶员随时接管,也不需要驾驶员的干预,你只需要坐在驾驶席上做自己想做的事,剩下的一切交给技术就好了。但是这种不需要驾驶员随时接管的自动驾驶,也需要在特定环境下,比如满足自动驾驶标准的公路上(比L3的应用场景扩展了很多)。
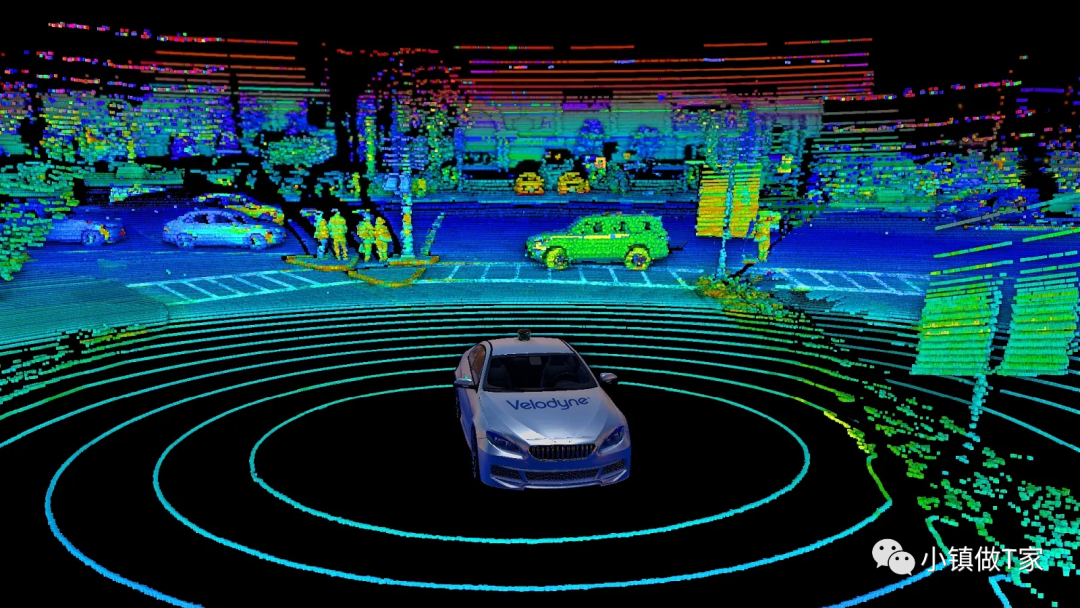
目前,市面上并没有L4级别的车辆投入商用。无论是国外的Waymo,还是国内的小马智行、百度自动驾驶事业部,做的都是L4自动驾驶技术的研究。它们的自动驾驶汽车有一个很明显的共同点,就是头上顶着一个大大的激光雷达:

激光雷达提供了极高精度和极其丰富的感知信息,这使自动驾驶车自如处理极端工况成为可能。激光为主,视觉为辅,再加上车上各种功能冗余的传感器及高精度电子地图,在开放道路上实现A点到B点的自动驾驶不再遥远。
这里要记住,激光雷达是实现L3/L4级别自动驾驶的必要设备。
L5:完全自动驾驶
这是自动驾驶的终极目标——可以全天候适应各种路况的无人驾驶。到那时,或许就没有驾驶员这个称谓了,你可以在车上干你想干的一切,只需要说出你的目的地,你便能安全到达。
如果再简单描述的话,可以参考下面这张图表:
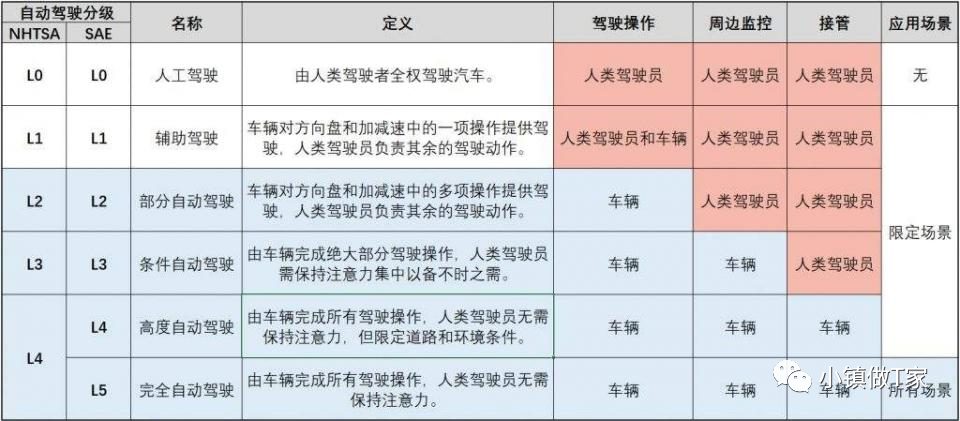
这样是不是就清晰多了?
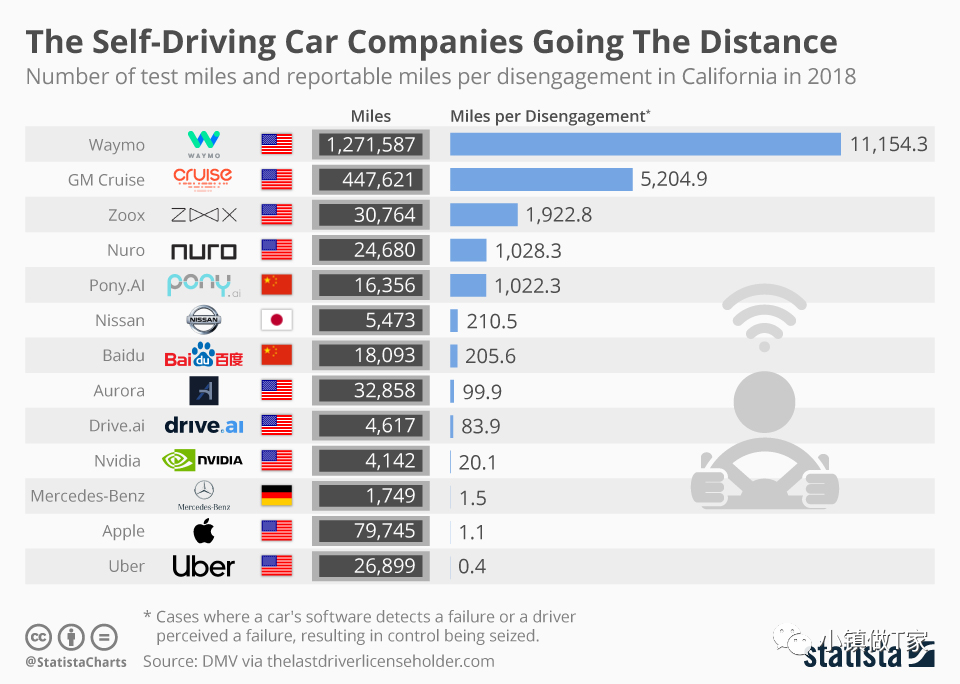
与之相对应的,是各汽车公司的自动驾驶技术一览表:

目前来看,奥迪是第一梯队;特斯拉是第二梯队;其他老牌车企是第三梯队。
L0~L5的进化鸿沟
汽车诞生200多年来,大部分时间都处在L0驾驶阶段,完全靠驾驶员控制。
上世纪70年代末,随着数字式电子技术和大规模集成电路迅速发展,才有了ABS(防抱死制动系统)的诞生,汽车行业开始进入L1驾驶阶段。80年代中期,ESP(车身电子稳定系统)问世,标志着L1驾驶的成熟。这一阶段,系统监测的主要是车轮的转速和承受的压力。
L2的面世年份,实际上很难界定。因为L2技术(自适应巡航+车道保持辅助)的诞生有早有晚,不过我更倾向于认为2015年特斯拉“Autopilot”的出现,可以认为标志着L2的面世。
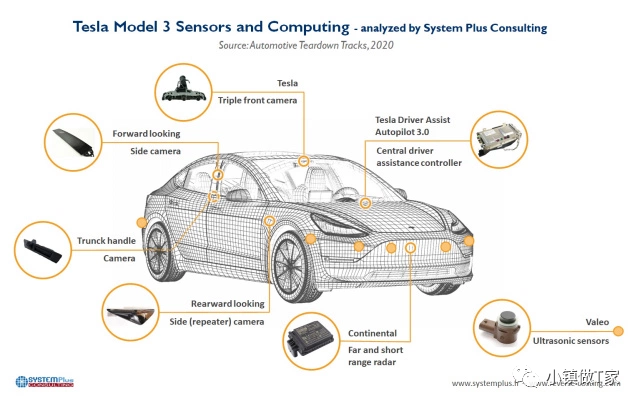
“Autopilot”为实现加减速控制,搭配了毫米波雷达传感器+动力控制系统+制动系统;对于转向控制,需要检测车道线并转向,搭配了摄像头传感器+电动助力转向控制系统。

(特斯拉各传感器覆盖的区域和距离)
摄像头主要负责图像数据采集,主要作用就是识别目标为何物。

毫米波雷达作为辅助传感器。可以同时对多个目标进行测距、测速以及方位测量。
与红外、激光、摄像头等光学传感器相比,毫米波雷达更能应对复杂多变的天气条件,比如其穿透雾、烟、灰尘的能力很强,具有全天候全天时的特点。

不过,以“Autopilot”为代表的L2级自动驾驶方案有很严重的缺陷。Autopilot 的算法策略是重摄像头轻毫米波雷达,过度依赖视觉检测。当车辆前方出现数据库中没有录入的物体数据时,就容易出岔子,这也导致特斯拉曾连续出过多起和大货车相撞的事故:

有兴趣的同学可自行百度。有特斯拉的同学,以后看到大货车,记得留个心眼。
L3是按照奥迪A8诞生的年份算的,也就是2017年。从L2进化到L3的关键一步,是激光雷达及高精地图的引入。比如奥迪A8的TJP(Traffic Jam Pilot)系统就增加了激光雷达(增强对外界物体的感知)和车顶定位天线(方便使用高精地图)。
目前Audi A8是唯一一个敢宣称自己达到 L3级别的车型。它的底气就在于,不需要驾驶员实时监控当前路况,而是车辆自己就完成了这一任务。而帮助A8完成这一任务的,是其强大的实时路况监控系统:
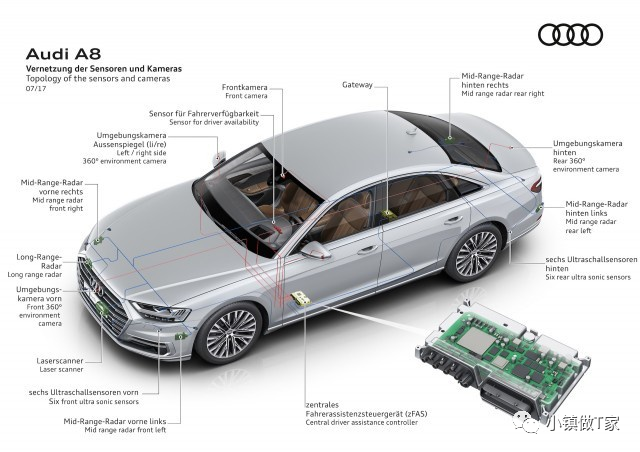
奥迪在A8前部、车侧、车辆后部配置了12个超声波传感器;在车辆前部、车辆后部及外部后视镜配备了4个360度全景摄像头;在风挡的上边缘配置了1款前置摄像头;在车辆的各角配置了4个中程雷达;在车辆前部配置了1个远程雷达;在车辆前部配置了1个红外摄像头;在车辆前部配置了激光扫描仪;在驾驶员座椅底部配备中央驾驶辅助系统控制单元(zFAS)。
算下来,A8全身一共布置了24个硬件设备。同类型设备负担着多方向/角度的监控;不同类型设备负责不同环境条件下的道路监控,比如雨雾天气条件下,摄像头无法充分发挥作用,这时候就要靠雷达来感知周围路况。全部设备感知到的数据,都会被强大的zFAS系统加以处理、分析,最后生成车辆控制指令。
对比A8和Model3,我们可以发现,A8的传感器明显多了不少,尤其是最重要的四线激光雷达(线束越多,精准度越高,目前百度和Waymo用于路测的车辆采用的都是64线激光雷达,这种雷达单个就要70万人民币左右)。
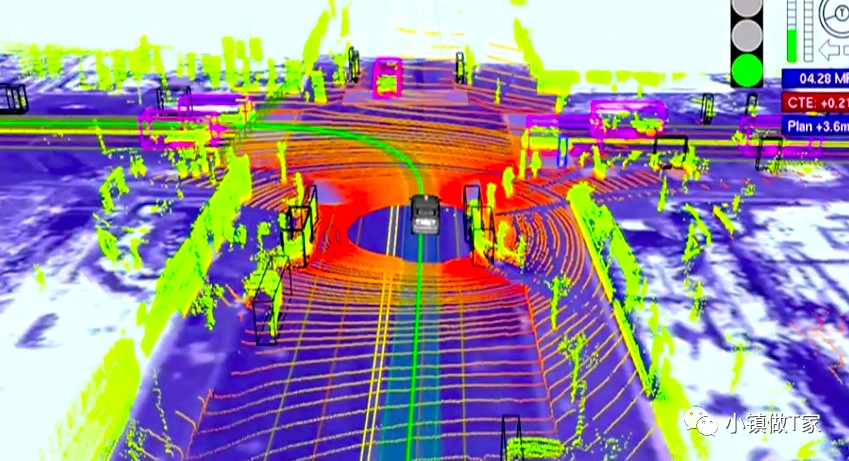
激光雷达的探测范围更广,探测精度更高。可基于其多个激光发射器和接收器,通过发射出去的激光束,建立三维点云图,实现对周围环境的高精度感知。
(激光雷达感应示意图)
与摄像头相比,激光雷达可直接返回被侧物体到自身的距离,测量距离更加直接且准确。此外还能够识别周围环境中障碍物的各种属性,如可跨越的(植被)、不可跨越的(岩石、树木等)、潜在的负障碍(悬崖、山涧等)。而且其抗干扰能力强,隐蔽性好,不受无线电波干扰(毫米波雷达的弊端)。
所以,L3对路况的监测,其实是融合了激光雷达、毫米波雷达、超声波雷达、前视摄像头、环视摄像头等多种传感设备的方案。然后再配合中央控制单元以及其他系统,最终形成L3级别自动驾驶能力。
现在看来,L3已经实现,只不过受限于昂贵的成本,只能先搭载在一些高端车型上(这也是马斯克一直坚持不用激光雷达的原因之一)。
然而,L3的落地,却不仅仅受限于技术和成本。很多国家的法规就是绕不过去的存在。也正因为如此,奥迪A8的L3自动驾驶也很少有用武之地,基本成了摆设。
顺带说一句,目前我国也是不允许自动驾驶车辆在开放及高速道路测试的。此前百度Apollo在开放道路进行测试后,就被请喝茶了。
从L3到L4,在激光雷达和高精地图的基础上,还要增加各种功能冗余的传感器,以及大量的道路测试,甚至还需要专用道路来进行配合。按照目前进度来看,L4商业化应用可能需要5~10年,无论是技术还是各国法规,都还在完善中。
L5需要高度发达的人工智能,目前看来还遥不可及。因此不多赘述。
最后,喜欢的老铁点个赞哈!
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
- 优雅的塑料君·2020-12-20百度无人驾驶车已经开始商用试点了,长沙就划了一个区域让百度玩,可以去体验一下,百度就差拿下一个车企,并深度造车了,或者干脆专门卖车机系统和解决方案,百度前两年的人工智能和自动驾驶研发投入巨大,从财报也能看出来,李彦宏就靠这个翻身重新进bat。1举报
- ukiyoe·2020-12-21一个车型到了自动驾驶的的哪一级,是取决于它满足了哪一级的要求,而并不是它是如何满足的要求的吧。毫米波,激光或者视觉传感器,都是实现自动驾驶的工具。但并不能说只有用了激光雷达的自动驾驶系统才是L3?逻辑关系似乎倒了1举报
- 必须宠你·2020-12-20[得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意] [得意]点赞举报
- 小two·2020-12-21如果有个收尾总结的话,文章会提高一个档次1举报
- 才神·2020-12-20那会是谁呢?1举报
- Teresa馥·2020-12-20不太懂的领悟1举报
- 屁抖抖·2020-12-20学习了[强][强]1举报
- uuuuuppppppp·2020-12-20这是18年的测试里程,有没有19年的1举报
- 不染_9117·2020-12-20阅了点赞举报
- 立白洗衣板·2020-12-20本田下一代旗舰要上l4点赞举报
- 撻噺賺賺賺·2020-12-20把啊啊啊啊啊啊啊啊啊点赞举报
- RayMegatron·2020-12-20一直不是特斯拉点赞举报
- 小小丘·2020-12-20阅点赞举报
- Am_Honest·2020-12-20贾跃亭的技术呢点赞举报
- 必须宠你·2020-12-20😆😆😆😆😆😆😆😆😆😆😆😆😆点赞举报
- 旺旺乎乎·2020-12-20这个写的很明白点赞举报
- 春风得意哦·2020-12-20努力做到更好点赞举报
- 人生自由2025·2020-12-20奥迪这么牛🐮?宣传不行啊点赞举报
- skyin·2020-12-20加油,努力赚钱点赞举报
- 虎大哥小哥·2020-12-20希望就在前方点赞举报
