
今天何小鹏发布了一条小鹏 P5 CNGP(City-NGP)的测试视频,不出意外的是测试仍然是在广州本地,但是不一样的是,这次的主驾是小鹏汽车的董事长兼 CEO 何小鹏,副驾驶是小鹏汽车自动驾驶技术副总裁吴新宙。$小鹏汽车(XPEV)$ $小鹏汽车-W(09868)$
2021 年 10 月,我们在广州体验了基于 P5 实现的城市 NGP 能力,在 2022 年初的财报电话会议中,何小鹏也透露:「 XPILOT 3.5 的核心功能城市 NGP 的研发进展顺利,在获得相关主管部门的审批后,计划于今年二季度末在首批城市推出城市 NGP。」
时隔半年,虽然我们没有实际体验到最新版本的 CNGP,但我们很惊喜地在视频中看到何小鹏毫不吝啬地对优点进行了表扬,也毫无保留地说出了当前的缺点,结合吴新宙的回应,我们也窥探到当前 CNGP 的大概水平。
测试数据概览
本次测试的车型为小鹏 P5 顶配版,硬件参数如下:
- 8 颗 ADAS 感知摄像头
- 4 颗环视摄像头
- 5 颗毫米波雷达
- 2 颗览沃激光雷达
- 30 TOPS 英伟达 Xavier 芯片
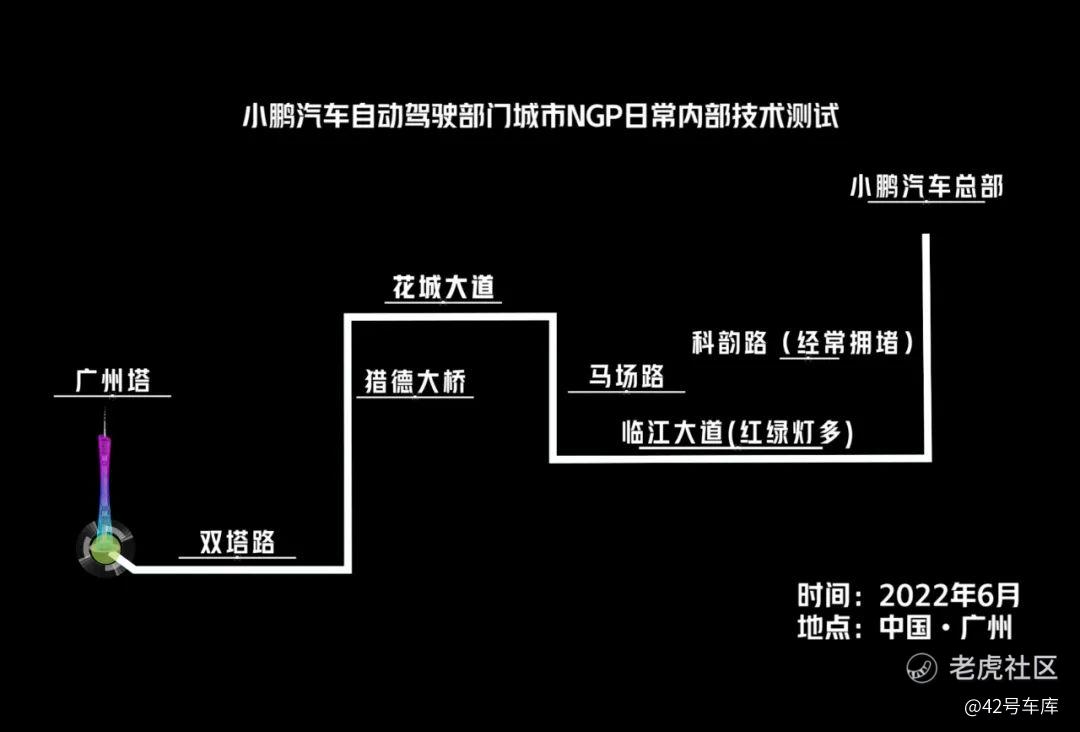
测试路线包含:
- 1 个 180° 掉头弯
- 1 段高德地图红色拥堵路段
- 3 个右转
- 2 个无保护左转
- 全长 17 km
- 总用时 49 分钟
我们对 CNGP 应该有一个怎么样的预期?
刚上车何小鹏就表示:「我的期望是很高的,希望能够达到一个中等司机的表现。」同时也直言:「像老司机是不可能的。」

随后吴新宙也明确了,城市 NGP 刚发布的时候,适用的场景更多是城市的主干道、次干道。
但也表示:「城市 NGP 每天都会迭代很多版,所以进阶会比人类快很多。」

而何小鹏也回怼了吴新宙表示:「我觉得大部分中国的驾驶员都比较聪明,我们 Machine 想追赶这些比较强的司机,我觉得还有很多很多年。」
从这一点我们也可以看出,小鹏的城市 NGP 虽然可以做到城市路况百公里 1 次接管,但是在体验上距离老司机仍然有很多年的差距。
CNGP 在哪些场景下的表现能令何小鹏满意?
180° 掉头
刚从小鹏总部出来就是一个 180° 的 U 型弯道,很多司机甚至无法一把完成掉头,但是在掉头过程中路口有混行两轮车的环境下,P5 仍然一把完成。

城市拥堵路段
跟随公交车通过一个红绿灯路口后,车辆进入了拥堵路段,从车机的导航显示中也可以看出,行进的路段已经显示为红色。
吴新宙表示:「在低速跟车的时候,不想变道的时候做得还 OK,横向做得比 LCC 要厉害很多,因为加入了很多横向挪移的能力。」

面对右侧压线行驶的车辆,系统会进行轻微的绕行,这点也得到了何小鹏的好评。
经过这段蠕行拥堵环境后,何小鹏对 CNGP 的评价是:「在非常拥堵的环节我觉得很舒服。」
同时还表示:「城市堵车的时候这个功能的是最舒服。」

极端场景能力
极端场景同时小鹏 P5 面对的难题之一,对此吴新宙表示:「得益于小鹏比较早的全栈自研,同时做了比较好的数据闭环,摄像头的感知能力还是比较强的,而且加入了激光雷达之后,在雨天的场景也会有更好的表现。」
吴新宙还透露,激光雷达需要额外解决的两个场景,一个是在大雨天地面溅起水花时,系统需要识别这是不是一个永久障碍物,同时在面对地面扬尘的环境,小鹏也对激光雷达的算法做了大量的优化,不会影响到功能的正常工作。
此外,在吴新宙看来城市场景,激光雷达十分关键,一方面是对交通参与者的识别和跟踪,纯靠视觉加毫米波雷达有一定挑战;另一方面,在面对城市道路中各种各样的静态障碍物,激光雷达可以无压力识别。
随后,吴新宙还透露,小鹏正在监测躺着的人、半蹲的人、坐轮椅的人,而这类型的感知都会通过激光雷达去做判断,不过受限于感知能力和仅有的 30T 的算力,还无法对路面的坑洞进行监测,但是在算力更高、感知更强的小鹏 G9 上这些都会识别。
不规范区域内的形式
在城市场景中,我们会碰到大量不规矩甚至骑着线开的司机,在面对这种场景,小鹏有一个全新的逻辑。
首先,系统会根据激光雷达监测到的障碍物行成一个可达空间,第二个是车道线,第三个是旁车的车流壁,也就是旁车的行驶轨迹,系统会根据优先级判断哪个对车辆行驶轨迹的影响最大。
在完成一个无保护左转后,吴新宙还表示:「在左拐的时候,我们是完全不按车道线走的,更多是按照旁车的轨迹行驶。」
CNGP 在哪些场景下还有待提升?
避让车辆后的响应速度
在避让车辆时,系统虽然做到轻微的点刹,但是当前车驶离后,CNGP 系统的反应速度慢了约 200 毫米。
虽然这种表现在自动驾驶行业已经习以为常,但是何小鹏则直言:「不够 Smart。」
对此吴新宙表示:「我们在纵向控制上会做一些优化。」
遇到大车的避让逻辑
在变道时如果遇到目标车道有大车,系统的处理会十分谨慎,甚至整车刹停避让。
用何小鹏的评价来说就是:「在遇到大车的时候我感觉他的智商会下降一代。」
侧面来车的减速逻辑
在测试过程中,出现了 2 次右侧后方来车的情况,在这种情况下车辆会进行较大减速度的制动。
何小鹏表示:「这个事儿逻辑就是侧面(来车)的时候,不应该把车刹到底。因为他就算撞你也没办法了。」
随后吴新宙回应:「我们在最新版已经给(处理了)。」
CNGP 在哪些场景下无法工作?
极度拥堵下的变道
第一个场景就是极度拥堵环境下的变道,吴新宙坦言:「在拥堵场景下,最难的就是变道,然后旁边的车也不一定会给你留空间,所以这还是一个比较难解决的问题。」
虽然我们在去年 1024 科技日的体验环节,感受过了小鹏 P5 的极限变道能力,在极端拥堵的环境下,系统会尽量偏向目标车道行驶,以给后方车辆一定的压迫感,试图在拥堵环境下完成变道。
但是实际的体验上,作为驾驶员感受是惊心动魄的,后续小鹏汽车也表示,在演示的版本中,系统的策略会激进一些。
在正式推送的版本中,如果遇到这种路况,系统会主动提醒驾驶员,请求接管。
吴新宙也透露,会引入一个低速跟随模式,在速度特别拥挤的时候,会把变道通过提示交给驾驶员来完成。
实线环境下遇到前方故障车辆
在测试中吴新宙表示,在实线车道下,如果遇到前方故障车辆,车辆并不会进行压实线变道绕行,如果是在虚线的环境下,会有一个比较大的绕行能力,但是如果是实线一定就不动了,会交给驾驶员来判断。
在后续的测试中刚好碰到了一辆蠕行的出租车,系统做出的反应是低速跟随,吴新宙表示:「前车有点在动,有没有双闪(就很难处理),如果是完全静止的车辆,我们回去绕它。」
显然在这种场景下,车辆的操作会和正常的人类司机有比较大的差异。
随后,何小鹏还打趣道:「旁边的的士在看我们,他看我们就是因为我们开得太菜了。」
写在最后
最后整个行程耗时 49 分钟,行驶里程 17 km,全程 1 次接管。
这个视频最大的亮点并不是小鹏 CNGP 的表现到底有多好,而是作为小鹏汽车 CEO 的何小鹏和负责自动驾驶的吴新宙毫无保留地输出了 CNGP 的优点缺点以及能力边界。
在智能驾驶技术的传播中,我们将长期面临 L2 到 L4 过程中的大量长尾场景不可用或体验不佳,正视这些缺点并保持信息的透明,就像辅助驾驶的可视化界面一样重要。
当两位直接决策者心中清楚这套辅助驾驶优缺点时,相比别的车企小鹏已经赢了一半了。
精彩评论