前些天跟业内的朋友聊天,感慨现在的新车太多了,消费者的注意力不够用。
如今一台车似乎除了惊爆价,其他东西已经很难刺激到大家,大部分正常和理性的东西无法调动消费者的兴趣,这种环境反过来催生了一些并不严谨却容易带来关注度的东西。
其中一个话题是舆论对于安全的认知在如今的氛围下变得越来越刻板和极端。

网络实战党:以事故双方变形量定「输赢」
现在网络上看待一台的车安全与否,数据和权威机构测试已经不再重要,微信群里的「实战视频」和各类极端测试反而占据了群众心智的主导,理性的讨论和思考被口水淹没。
这样的环境,真的能让大家建立起正确的安全认知吗?
安全并非线性逻辑
被忽视的「过犹不及」
前段时间又看到一个媒体的 AEB 测试,一台测试车在 120 km/h 的时速下没有刹停,然后弹幕里齐刷刷的嘲讽。
这个事情非常典型,它让我想到一个现实生活中的例子:行车速度与驾驶安全的问题。
大部分新手司机对于这个问题的认知很单一——越慢越安全。
但是真正的老司机并不会这么觉得。因现实生活中速度和安全之间不是这么简单的因果关系,面对不同的场景,不同的道路类型以及不同的路面附着力条件,该快的时候要快,该慢的时候要慢。一味地慢在很多场景下反而会是更危险的选择。
两者差异的由来在于两类人对驾驶和安全的理解层次不同。越是理解驾驶的复杂性,就越是会理解驾驶安全构成的多元性。
智驾安全其实也是其如此。
最近这几年智驾从小众走向大众的过程中,主动安全功能在其中扮演着重要的角色。而 AEB(自动紧急制动系统)就是这项功能的典型代表之一。

AEB 自动紧急制动系统
AEB 的核心是在事故发生前避免或者减轻碰撞。一些近期才关注这方面内容的朋友可能有所不知,AEB 在汽车行业并非新鲜事物。
早在国内新能源和智能化还方兴未艾的燃油车时代,就有很多的传统国际大厂开始在量产车是搭载这个功能。
欧盟更是从 2014 年开始就要求所有出厂新车必须配备 AEB,并且在 Euro NCAP 测试中将 AEB 纳入评分项。
国内在这方面的起步相对要晚,整体群众对此的认知也并不普及。随着这些年智能汽车将主动安全代入公众视野,针对主动安全的媒体测试在这几年也显著增加。
对于广大消费者而言,有这方面的内容来普及主动安全的认知本应是一个好事。但当这类测试开始变得越来越多能拿高分的车型也越来越多之后,观众也开始褪去新鲜感。
于是为了追寻差异化,营造更精彩的节目效果,很多测试开始从各种维度增加测试难度,例如提高速度,增加光线等环境干扰。但是考核的标准依然是车辆能否刹停。

媒体的全黑逆光场景测试
如果从这种角度来看,AEB 的开发应该是一个目标十分单一的工作——不管外界情况怎么样,不管速度多快,只要能重刹停车就行了。
但「在任意速度下刹停」其实和 AEB 设计的初衷「减轻或者避免碰撞」并非完全对等的一回事。
从事主动安全的工程师都清楚 AEB 开发是一个复杂的系统工程。从功能权限上来看,AEB 是一个能从开车人手中夺取驾驶权直接控制车辆制动的功能。
这就意味着 AEB 在设计之初就是一个非必要不触发的功能。真实的驾驶环境充满着复杂性,人类驾驶员相比机器更能理解和应对这种复杂性,在有操作余地的情况下能做出更好的决断。
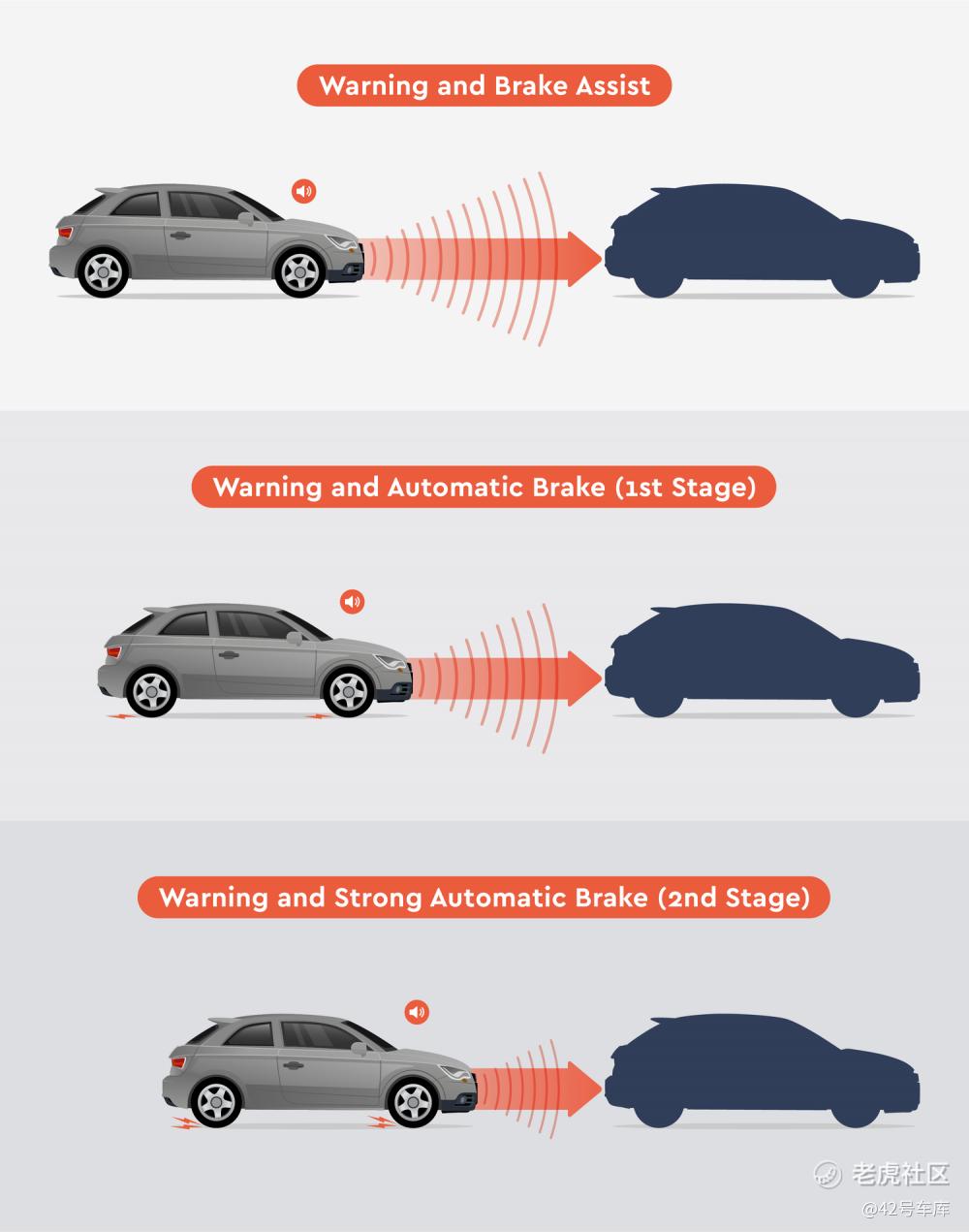
AEB 逐级触发示意图
实际上 AEB 的触发链条恰恰也是一个逐级提高的逻辑。对于道路前方出现静止车这类驾驶员仍有操作余量的场景下,系统会先进行报警提示,提示后再刹车,直到最后的极限刹车点才会全力刹车,做最后的兜底制动。
例如在高速 120 km/h 行驶的工况下,车辆面对静止前车只是简单粗暴地进行重刹停车可能会带来一些负面情况,简单的比如追尾,又或者是触发 ABS 的大力制动导致车辆严重转向不足,难以做出避让动作。
高速工况 AEB 过度制动导致追尾
因此其实很难说一套 AEB 的刹停速度越高,它的安全系数就越高。
此外,即便 AEB 触发链条没有到达第三级,或者是因为距离等物理限制碰撞已经无法避免,系统介入制动让最终发生碰撞的速度降低也实质性地减轻了事故损失和人员的伤亡。
其实类似的「过犹不及」的情况其实还有大家更为熟知的车道偏离辅助系统,它原本的设定是在车辆压线时掰一把方向盘,让车辆回返车道内行驶,防止车辆行驶中偏离车道发生事故。
车道偏离辅助介入演示
但是现实中很多驾驶经验丰富的老司机都会关掉这个功能,只保留车道偏离预警。因为有时候驾驶员在快速避让时来不及打转向灯,一旦触发这个功能,系统会掰方向和驾驶员作对,反而导致车辆不受驾驶员控制,增加风险。
AEB 真正有价值的场景,通常是人类驾驶员没注意到,又或者是注意到但反应不过来的场景,比如城市中的盲区来人、鬼探头、电瓶车闯红灯之类。
面对这些场景,人也会重刹停车。但 AEB 系统有更好的感知和更快的反应能好地做出响应。但是在高速上,面对前方物体重刹停车并不是一个适用所有场景的策略,这么做的结果到底是好是坏很难说。这也是很多厂商并没有急于推出这一功能的原因。
难以测试的隐藏性能
除了不考虑实际情况,过于单一地追求高刹停速度,很多主动安全测试还有一个问题那就是只考虑了能不能触发,没测试会不会误触发。
考虑到 AEB 的工作特性,理论上它的每一次触发都应是「不得不触发」的情况。其终极的性能目标应该做到「只在需要制动的情况下进行制动」。
现实中要接近这个目标,不仅要做到该触发的场景尽量不漏触发,还有一个很重要的指标就是不该触发的场景不要误触发。这是一个让系统在触发判上定变得越来越精准的工作。
除去确定会撞和确定不会撞的场景,实际生活中还有相当一部分的中间地带是「不太好判定会不会撞」的场景。这些场景下如果目标只是避免碰撞,厂商大可以粗暴地以「宁可错刹一千,不可放过一次」的态度增加 AEB 的灵敏度,先刹了再说,这样一来在测试中会更容易取得好成绩。
但追求 AEB 的高触发率,通常也伴随着误触发率的上升。没有人喜欢系统突然给你来一脚毫无必要的刹车,AEB 误触发的后果轻则全车吓一跳,重则导致后车追尾,甚至造成车内乘客受伤。
但在现有的媒体测试中,几乎没有关于 AEB 误触发的测试。这是因为 AEB 误触发的几率在绝对数据上很小,如今国际知名供应商的 AEB 方案可以将误触发做到 10 万公里小于一次的级别。哪怕这个数字提升十倍,变成一万公里触发一次,听起来仍然很小。
但如果我们把这个几率放到一万台车,每台车平均每天开 30 公里的的前提下去看,那么每天就可能有 30 起的误触发事件,如果变成十万台车,那么每天就是 300 起,这并不是一个小数字。
另一方面,从概率学上来说即便 AEB 误触发率提升十倍到一万公里触发一次,它仍然几乎没法通过媒体测试来检验,除非让测试机构租上万台车去路测,这显然是不现实的。
所以只有互联网新势力的厂商在后台能清楚自家 AEB 的误触发率到底是多少,但数据是否公布以及其真实性就无从验证了。
因此从误触发率和前面提到的刹停在不同速度和场景下的区别这两个事情我们已经可以看到主动安全的复杂性,所以反过来讲,主动安全的测试可以说和研发同样是复杂且多维,单一的性能指标无限提高测试固然可以分出高低,但站在真实场景下思考用户价值,它真的能分出好坏吗?答案可能不是那么简单。
智驾安全的完整视角
智驾比人驾更安全吗?
智驾安全当然也不止 AEB,最早开始往做这方面宣传厂商的当属特斯拉。
Autopilot 对比人驾的里程事故率数据过去几年已经多次出现在财报和各类技术发布会上。从这个数据开始公布至今,特斯拉智驾的事故率一直显著低于美国国家安全局 NHTSA 统计的全美平均里程事故率。
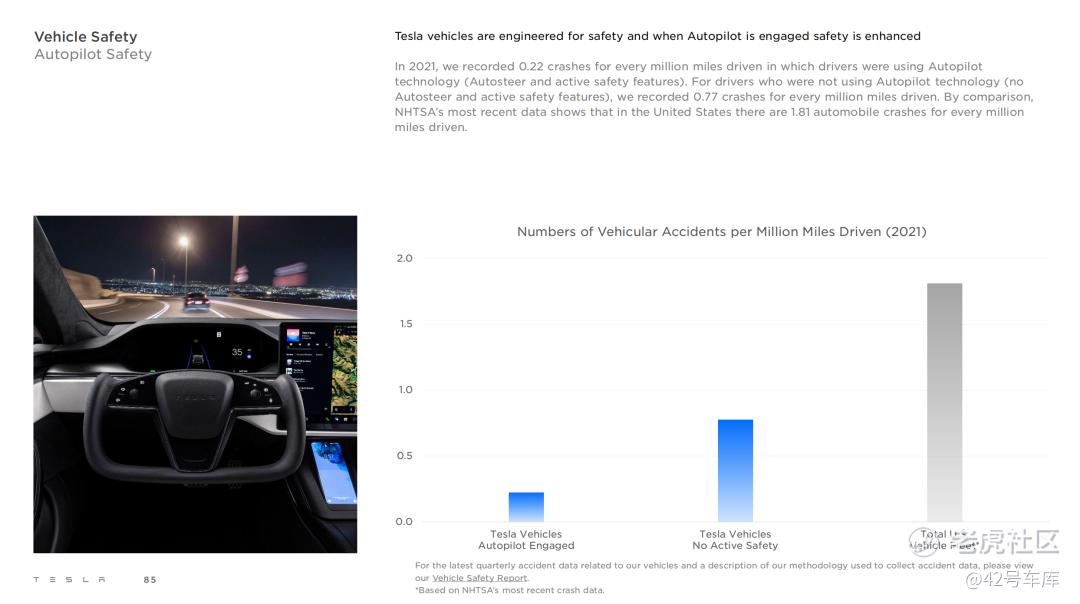
2021 年特斯拉公布的每百万公里事故统计

2023 年特斯拉智驾开启状态下平均每 564 万英里才发生一次事故
特斯拉想传递的信息其实就一个——智驾比人驾安全。
但如果仔细想一想,你就会发现这种传播表达并不精准。因为目前的智驾都是法规 L2 阶段的辅助驾驶,要求驾驶员的注意力不能离开路面,双手不能长时间离开方向盘,驾驶员有车辆的最高控制权同时也是车辆事故的第一责任人。
这就意味着即便开启智驾,在大部分情况下驾驶员其实依旧在监督智驾的运行状态,在这种有监督的情况下很难说驾驶员会眼睁睁看着智驾犯错而无动于衷,碰到智驾解决不了的场景通常都手动接管自己开了。

智驾状态下,驾驶员仍在监督车辆
这种模式下其实是人 + 智驾两套系统在并行,遇到高难度的场景再切回人驾。
因此更准确的说法应该是人 + 智驾,比纯人驾安全。
在这种人机共驾的模式下,两者可谓是各有所长。人有强大的场景理解和变通能力,而智驾系统又能做到无时不刻眼观六路,视野盲区更少,在恶劣天气下的的环境感知更多维,对于相对速度的测算比人更远,急刹反应更快,弥补了人开车随着时间变长精力会下降犯困等问题。
值得强调的一点是这种「更安全」只建立在智驾 + 人驾监督的人机共驾条件之上。
如果像网上某些视频中一样把开智驾当成打出租车,完全不管道路情况自顾自睡觉或者玩手机,将本应人机共驾的状态放手为只有智驾,那么一旦碰到智驾处理不了的弱势场景很有可能发生事故酿成大祸。

海外网友作死开智驾睡觉
这样的事件在这两年屡见不鲜,在网上我们经常会有人说谁谁谁的智驾又出事了,但对于一套明确设定上是人机共驾的系统,因为人的分心或者滥用智驾出现了事故,更准确的说法应该是在人驾环节已经缺位的情况下,智驾没能避免事故的发生。
智能如何让驾驶变更安全?
从我们自身的角度出发,提升驾驶安全的方式包括生理性的、技术性的、意识性的。
生理性的比如不要疲劳驾驶,不要在身体不适,腿脚活动受限的时候开车;技术性的比如提升控车能力,增加避让和躲闪的应急表现,在车本身性能能搞定的避让和刹车场景尽量不要因为人的操作不当发生失误;意识性的例如增加对于驾驶环境的观察和理解,具备防御性驾驶逻辑。
智能安全提升的思路其实也是这几个方面。
就以我今年春节开回家的极越 01 举例来说,它的车内有 DMS 驾驶员监测系统,不管开车人是否开启智驾,它都会在驾驶员犯困的时候给予全方位的提醒和警告,有文字提示,有声音提示,甚至有电动安全带预警提示,如果这些提醒之后驾驶员再无反应甚至会打双闪减速停车。这些是系统从人的生理角度来提醒人驾应保持状态在线的预防手段,以及万一驾驶员因为身体因素不在线之后的保险手段。

极越 01 上用于防止驾驶员分心和疲劳驾驶的 DMS 组件
接着是控车技术向的,除了 AEB 这样的纵向主动安全,如今极越也在开发横纵联合的主动避险功能。当前方突然有障碍物且两侧又有空间的情况下,系统可以辅助驾驶员做横向避让。这个过程不仅要求主动安全系统积极工作,同时也需要车身的 ESP 一同参与,不仅要能避开,还要安全稳定地避开。
意识的提升则是更高维度,也是极越智驾发展中一直在进步的事情。随着智驾感知系统和规划系统的迭代进化,车辆不仅可以察觉到更多潜在的风险,还可以更熟练地通过规控去避免这些风险,防患于未然。比如此前上车的 OCC 技术就提升了系统对于通用障碍物的避让绕行能力。

极越 OCC 网络
把这些事情综合在一起,可以看出这家公司在安全上的思考和投入,看到他们在智驾上用更符合实际场景的策略在保障行车安全。他们没有去做一些看起来很刺激,但实际上并不一定适合所有场景的策略,因为他们深知真实驾驶的复杂性,也理解驾驶安全构成的多元性。
写在最后
安全是底线,消费者关心安全天经地义,企业注重安全也值得鼓励。
但汽车这么一个成熟发展的行业,事关安全的检测已经有很多严谨和标准化的评价体系,例如碰撞测试,在各大汽车市场都有自己专业的测试机构,这些测试远比所谓的马路「实战小视频」要科学得多也严谨得多。
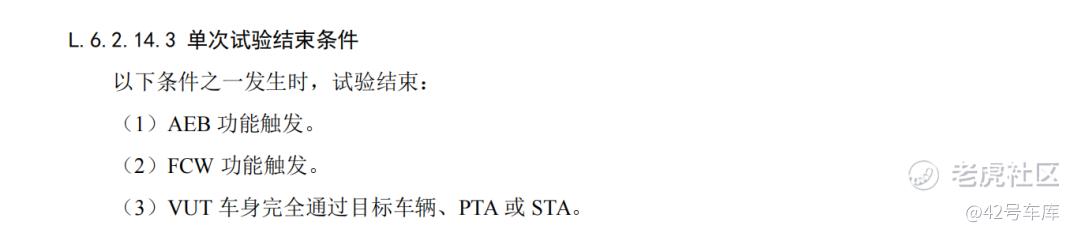
其实这几年主动安全也被这些机构纳入了测试范围。例如我们前面提到的 AEB 误触发问题,在 C-NCAP 2024 版《主动安全ADAS试验规程》中就加入了 10 项 AEB 误作用测试场景总结,测试中要求 AEB 和 FCW 均不误报。

这些专业机构的测试没有解说和台词,看起来也许没那么有节目效果,但对于条件一致性的把控,对于测试标准的细节和技术的考量有更深层次的思考。
在安全问题上,这些不需要播放量和弹幕,不需要平台算法推荐的严谨测试,才是真正有有量化结果参,有考意义的安全测试。
最后也再次强调,不论是智驾安全还碰撞安全,谈安全之前我们首先应该理解安全是什么,尤其理解安全在不同场景下的复杂和多维性。只有这样才能鉴别什么是有效的安全,才能判断不同企业对于安全的价值观。
精彩评论