作者 |马波
编辑 |德新

2023 年初的一天,极越 CEO 夏一平与百度智能驾驶事业群组(IDG)首席研发架构师王亮进行了一番对话。
他们谈论的主要内容是,已经决定上车的激光雷达到底要不要拿掉。在经过了一番讨论后,二人决定「赌一把」,扔掉激光雷达这根「拐杖」。
2024年2月23日,极越正式推送了V1.3.1的版本更新,其中最重磅的一项是占用网络OCC的上车。这样一来,极越成为了继特斯拉后,第二家,也是行业唯二基于纯视觉落地高阶辅助驾驶的车企。
在前瞻技术方面,极越在2023年初决定All in纯视觉,2024年初推送占用网络,成为首家部署OCC占用网络的纯视觉智驾路线车企,并且夏一平还表示极越已经明确下一步研发重点将是端到端大模型,与特斯拉展开技术上的直面竞争。
在工程落地方面,夏一平称,极越01与07的PPA城市领航将很快就能够实现「全国都能开」。同时他也做出判断,极越的OCC上车后,将会有更多车企选择走纯视觉路线。并且在2024年这个时间点,做不到「全国都能开」的智驾,将会被淘汰。
极越这个在2023年下半年才发布第一台车的「新兵」,是怎么在技术上直追特斯拉,在工程上紧逼华为的?
一.极越的背后,有老玩家撑腰
追寻这个问题的答案,其实就是在探究百度在智能驾驶领域的深厚积累。

早年间,行业里针对自动驾驶应该走Waymo式的跨越式路线,还是走特斯拉的渐进式而争论不休时,百度就已经实践了多种技术方案。第一是L4级的Robotaxi,到今天,百度Robotaxi车型已经发展至第五代。并且百度作为智能驾驶方案供应商,ANP也在不同车型上相继落地。Apollo Lite更是早期百度对于纯视觉技术方案的探索。
早在2019年,百度就通过小项目进行高强度的纯视觉尝试,从Apollo Lite到上车极越01,百度的纯视觉完成从0到1的进化,总计用时五年。
全球智能驾驶玩家行列中,基于纯视觉路线的车企/供应商并不多,细数一下,较为知名的有 Mobileye、特斯拉、Apollo/极越与大疆等等。
特斯拉与极越也成为了唯二基于纯视觉落地高阶辅助驾驶的车企。
但是,不管是智能驾驶从业人员,还是看热闹的行业爱好者,都知道纯视觉相比激光雷达与视觉融合的路线,在技术难度上面临的挑战是更多的。
二、OCC,纯视觉瓶颈的突破口
在王亮看来,激光雷达提供的信息可以让智驾方案快速跑起来,也就是获得不错的「初速度」,但同时也会让工程师产生惰性,懈怠了对于视觉感知能力的开发。
视觉方案的「初速度」很慢,这是一种「吃力不讨好」的方案,同时视觉还有一个更大的问题,那就是如何规避道路上异型障碍物。
虽然视觉有着更加丰富的纹理信息,同时分辨率也是激光点云所无法比拟的,但是它不具备深度信息,且系统需要「认识」道路上无穷无尽的异形障碍物。
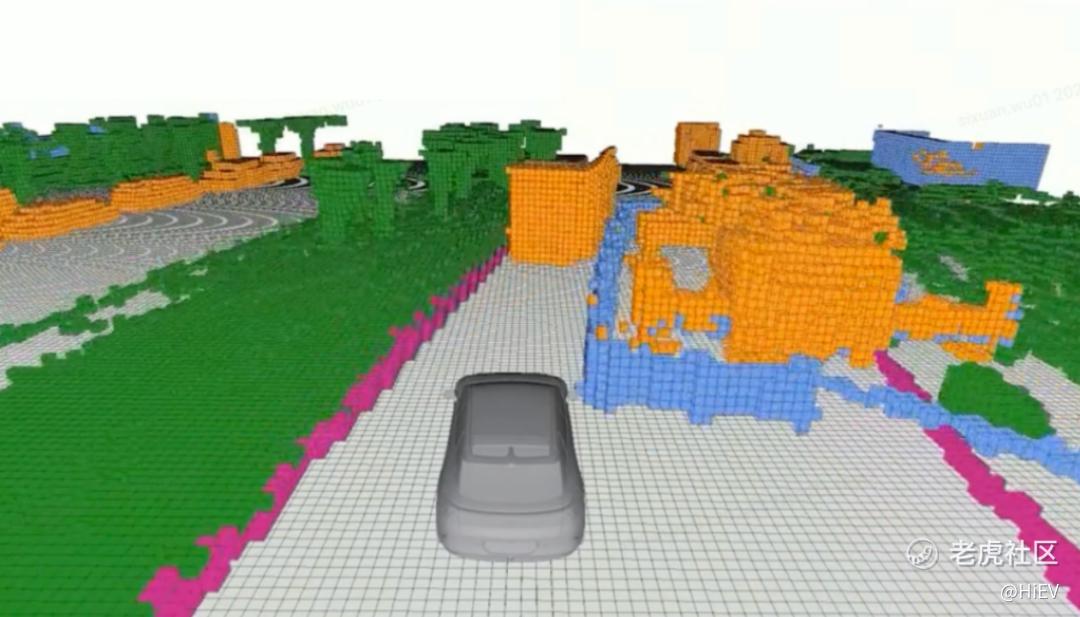
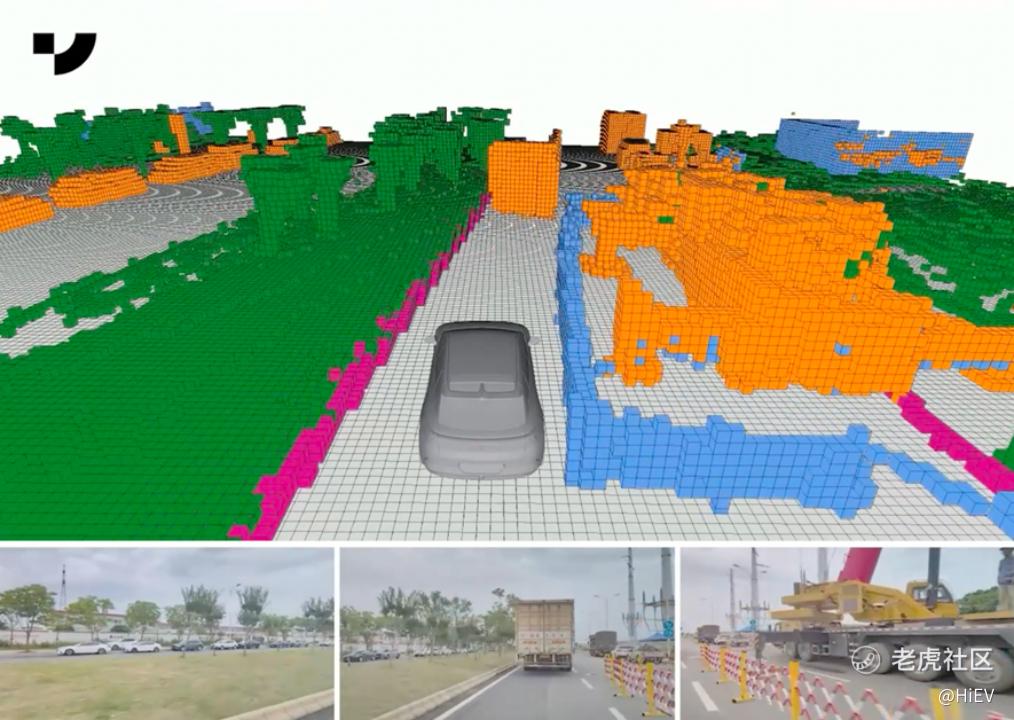
Occupancy Network(占用网络)成为了一种解法。
2022 CVPR上,特斯拉Autopilot工程总监Ashok Elluswamy分享了Occupancy Network技术,并且这个词在不久后的特斯拉AI Day上被更多人熟知。
这是一种实时的物理世界的重构技术,将现实世界格栅化,然后定义哪个单元被占用,哪个单元是空闲的,以此输出给系统可行驶空间。
Occupancy Network技术可以更好地解决通用障碍物难以处理的问题,让纯视觉突破瓶颈。
2023年1月,夏一平决定部署Occupancy Network。从决定部署,到OTA上车,极越用时一年出头,夏一平称这是一个「奇迹」。

至此,极越完成了B.O.T(BEV+OCC+Transformer)三向箔纯视觉感知架构,成为国内唯一基于大模型的纯视觉感知技术的车企。
而下一步,极越和特斯拉的竞争方向将转向端到端大模型。
三、端到端,下一项技术竞争高地
特斯拉在V12版本中向内测用户推送了基于端到端的FSD。什么是端到端,简而言之,过往的自动驾驶有很多子系统,包括感知的探测、跟踪,还有静态的环境建图、目标轨迹的预测和本车的轨迹规划和控制。
在分模块方案中,不同的模块由不同的团队负责,模块与模块之间仿照人类的认知步骤,设计了清晰的接口和界面。
而端到端大模型,则消除了自动驾驶所有的子模块,输入传感器信号,输出规划的轨迹, 甚至甚至直接输出控制信号。
刚刚落地OCC的极越,就已经部署了端到端的大模型计划。
在谈到端到端大模型时,夏一平聊起了与特斯拉相比起来的优势与短板。在视觉方向上,极越与特斯拉是全球唯二两家用纯视觉做自动驾驶的车企,二者属于第一阵营。
特斯拉在「端到端」上有一定的领先,但是极越落地能力更强。第三,当极越有同样团队开发出同样好的大模型,拥有同样的算力,数据迭代的飞轮起来,就将能够在国内保持持续领先。极越身后的百度,不管是在自动驾驶算法和工程领域,还是AI能力,都有着深厚的积累。
还有一点至关重要,极越在复杂的中国路况上积累的经验远比特斯拉强。夏一平称,他在美国试过FSD,美国的路况和道路情况,不管是标准化道路结构还是规则都比我们国内好很多。言下之意为,基于端到端的FSD进入中国后的表现并不一定会超过极越。
四、推动PPA发展,百度训练集群不设上限
当智能驾驶进入大模型时代后,数据驱动的时代将真正开启。
端到端的优点非常多,例如它可以消除严重的模块累计误差、可以更加高效的传递信息,但同时也有debug困难这样的缺陷。
想要让系统获得更加类人的体验,就只能喂养大量的优质数据。
这就到了玩家们拼家底的时候了。
自动驾驶是一个烧钱的项目,每一环都需要资金,其中最重要的是,当自动驾驶由规则驱动走向数据驱动时,就会进入算力比拼的时代,算力集群的建设就会变得至关重要。
而极越的背后,是百度这样的世界级AI公司给予的支持。
王亮称,用于极越自动驾驶相关的整个资源池,训练算力范围大概在1.8-2.2Eflops范围之内,而且非常明确的是,对智驾算力的支持上不封顶。极越PPA使用越多,算力上的投入也会持续的增加,极越会用数据驱动的方式把体验做得更好。
作为对比,小鹏的扶摇智算中心算力为600 PFLOPS、理想智算中心算力为750 PFLOPS、华为车BU算力中心算力为2.8 EFLOPS。
2023年特斯拉投资者日上,Elon表示,到2024年底,特斯拉会将Dojo算力堆到100 EFLOPS,根据stateof.ai的报告来看,特斯拉在去年10月部署了超过10 EFLOPS的算力。
在算力集群与端到端模型部署上,特斯拉确实存在领先性,但是极越仍然在竞争中保持乐观的态度,一是极越在很短时间内完全了感知架构的部署,二是百度的全面支持,硬件与软件上的持续投入,帮助数据驱动的PPA不断迭代,也就是夏一平与王亮口中的数据飞轮,当数据驱动真正高速运转起来时,带来的体验是日新月异的。最重要的是,FSD在美国一枝独秀,但始终无法进入智驾竞争红海——中国。极越这样的玩家在国内杀出重围,并不害怕还未真正进入智驾试炼场的FSD。
五、开城,极越后来居上
在2月23日的直播上,夏一平同步宣布,极越07上市时,极越PPA即可实现「全国都能开」。这是继华为后,第二家喊出「全国都能开」口号的企业。
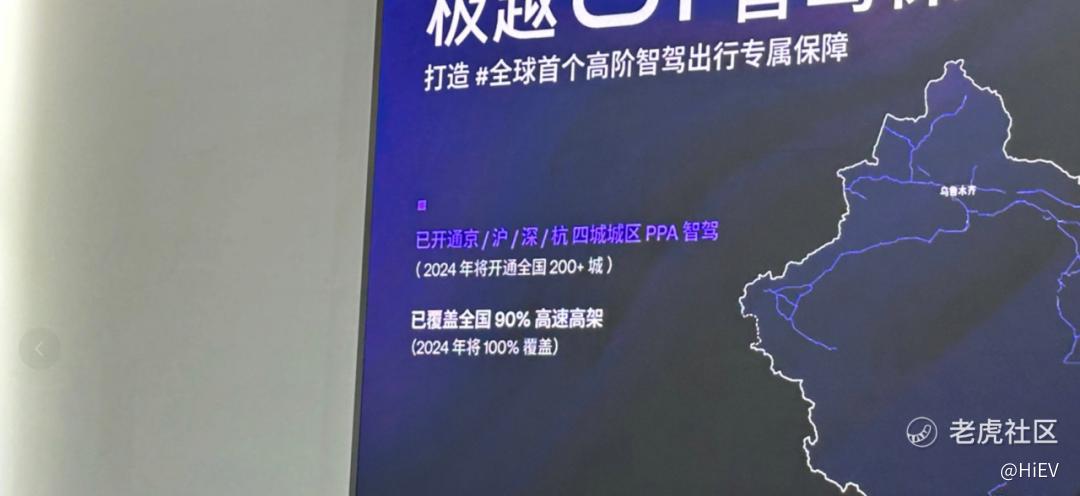
在今年1月的OTA沟通会上,极越定下的目标是,2024年实现全国200+城市PPA的目标,但是仅仅过了一个月,极越就将目标改为激进的全国都能开。
在更多人的印象中,极越对于开城持谨慎态度。极越是如何做到,仅仅时隔一个月,就突然从谨慎变为激进,并且定下全国可开的目标的?这其中的核心原因有两个:模型的泛化能力与百度地图的丰富信息。

第一点,通用的模型在交通规则与设施大同小异的不同城市,也展示出了非常强的稳定性,超强的泛化能力加快了开城节奏。第二点则是百度地图的功劳,百度地图为极越提供了基于车道级数据的城市车道级导航产品,高/快速路、市区道路都能1:1还原真实道路细节,提供更加清晰、立体的全局车道规划和引导,为极越的PPA提供了丰富的信息。
这就是为什么夏一平能够自信地讲出:「只要百度地图导航里有的地方,一定是百分之百都能开。」
基于业内首创的地图生成大模型,截止2024年2月,百度地图已经完成全球最大规模、覆盖全国360万公里道路的LD车道级地图数据制作,并支持极越城市PPA达到传统高精地图水平。LD车道级导航将在百度地图各端陆续上线360座城市,同步支持极越PPA全国开城,实现「有图的道路就能 PPA」。
近期,百度地图又宣布其车道级导航已开城至甘南、双鸭山、图木舒克等城市和地区。
百度不同生态产品相互之间协同作战,也是极越的核心竞争力之一。这是中美其他竞争对手都很难获取的资源。
六、CEO够卷,极越脚步够快
看完了整场直播,再结合此前的沟通会与亲自下场直播,极越CEO夏一平给我留下的一个深刻印象是:够卷。

夏一平称,他每天都在深度体验极越01车辆本身与最新的系统,发现问题后会第一时间反馈给同事。一直以来,他都很关注所有的用户体验,所有OTA功能上线规划,同时自己非常深度的参与,并笑称CEO先开,确保安全了再推给用户。
同时夏一平似乎也很喜欢这样的节奏,「从上市到现在,已经收到几万条的反馈,你每天会感觉到你跟用户是连接在一起的」。并且还给自己做了一个让自己忙碌的事情,可以让用户通过车里SIMO报各种各样的问题。
不管是个人微博,还是极越的OTA发布,夏一平总是奋斗在第一线,与用户和媒体分享极越的软件体验。
在直播过程中,嘉宾询问夏一平和王亮进行沟通的频率是怎么样的?王亮称,他和夏一平会随时交流,包含了产品、技术趋势和战略。即便是过年期间,二人也有很长的交流对话。甚至两边的团队也在很紧密的配合,跟一家人没有区别。我们有时候还互相到对方办公室所在地长期工作。这是量产过程中会经常发生的情况。
CEO带头卷,团队足够亲密。或许这就是极越能够在如此短时间内,在技术与工程上取得长足进步的原因。
精彩评论