2023 年,是智能驾驶行业的分水岭。
在 2023 年之前,智能驾驶讲究「高性能」,疯狂堆料的高阶智能驾驶成为车企对外营销的主要卖点。
进入到 2023 年后,随着汽车市场降价潮的来临,智能驾驶开始逐渐从大算力、多传感器的硬件预埋走向「追求极致性价比」。
「今年最头疼的事情不是开城数量多少,而是如何将智驾系统成本降得足够低。」一位行业从业者表示。
越来越多从业者的共识是:在最优性价比的前提下,将 L2/L2+智能驾驶作为标配,是智能驾驶赛道的主流;只有足够高性价比的方案才能被车企接受,才能向更广泛的受众普及。
「L2 级市场开始朝标配化趋势发展,L2.5 级市场正在快速破冰。今年以来,行业里就涌现出较多具有高性价比、用户体验过硬的产品。」一位行业观察人士指出。
数据显示,在新能源汽车销量趋势中,具备核心智驾功能的车型渗透率在快速提升,尤其是 15 万-25 万元和 25 万-30 万元价格区间,几乎以两年翻倍的速度在提升。
这同时也意味着,在更下探的汽车市场,如何打造更有性比价的智能驾驶解决方案,正在成为车企以及智能驾驶产业链玩家加速攻克的方向。
这一次四维图新双管齐下,通过极致性价比的轻量版 NOP Lite 和轻地图 HD Lite,强势杀入高阶智能驾驶赛道。
在四维图新 CEO 程鹏看来,「性价比」是普及智能驾驶,推动智能汽车走向规模化的重要一环。
01 打造「极致性价比」,智能驾驶解决方案商是如何思考的?
随着风向的改变,智能驾驶产业链上游的科技公司也把产品的落地性和性价比放到了更高的位置。
今年上半年,有自动驾驶公司给出了这样的思考:L2+智能驾驶系统的总成本占整车售价的 3%~5% 是合理区间:
低于 3%,性能过低仅在配置表呈现实际难以使用;
高于 5%,对车企的成本控制和消费者的选购意愿都会带来挑战。
这两种情况均不利于智能驾驶的普及。
按照中国市场的主销车型价位分布,L2+智能驾驶系统的成本区间是 5000 元到 15000 元,也就是说智能驾驶功能最低可下放到 10 万元售价的车辆上,比小鹏汽车创始人何小鹏曾说的「15 万元是智能汽车的分水岭」还要低。

在刚刚举办的四维图新用户大会上,四维图新 CEO 程鹏进一步明确:车企可接受的领航辅助驾驶价格,约占整车售价的 3%。
他表示,「量产需要性价比。1 至 2 万元一套的智驾系统很难被用户接受和感知到,最后投入了大量资金和人力研发,却没人买单,公司的研发成本就没有办法分摊。」
四维图新推出了一套轻量版领航辅助驾驶系统方案 NOP Lite,能够在 5 TOPS 算力下实现行泊一体以及轻量版 NOP 功能。
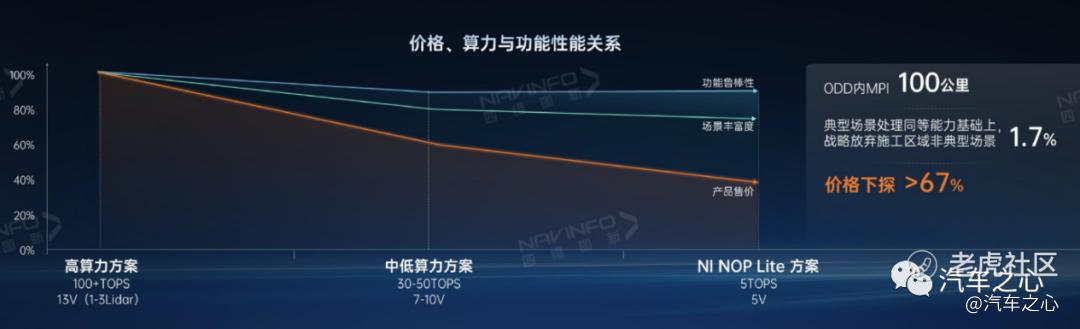
程鹏解释,这一方案可以用极少的算力,达到友商 100 TOPS 算力产品的功能,仅有 1.7% 用户较少使用的场景需要人为接管。
NOP Lite 基于单颗地平线征程 3 芯片,传感器配置为 5V5R,在 5TOPS 算力下可以实现行泊一体和轻量版的 NOP。
在具体功能上,这套解决方案可以在小算力方案下实现基于导航信息的点对点通行功能:
NOP Lite 可根据导航规划及四维图新 HD Lite 地图数据提供变道参考信息,在接近主路出/入口时系统自动开启转向灯准备变道,并智能调节车速,辅助车辆驶入或者驶离当前高速主路或切换至下一高速。
极致降本的背后,是四维图新对智能驾驶的整体方案做出的「断舍离」:
对应用场景进行裁剪,算力要求特别高和特别复杂的场景让人接管。
将算力应用到极致,不做冗余算力。
尽可能复用车内传感器,将闲置算力用到极致。
对缺乏人才积累,用户群难以支撑智驾系统高昂成本的车企来说,四维图新提出的这一轻量化方案有利于降低车企进入智驾领域的门槛,帮助车企的更多车型拿到汽车智能化下半场入场券。
02 智能驾驶需不需要高精地图?市场依旧缺高性价比地图
提前采集和使用高精地图,是车企过去推行高阶智能驾驶方案时的主流做法。
但随着车企将智能驾驶的竞争卷向城区,高精地图采集难度大、更新频率低和维护成本高带来的问题,被部分头部新势力视为普及城市 NOA 的阻碍:
高精地图城市覆盖率低,且每年城区的道路变化在 30% 左右,但图商更新速度最快只能每季度一次,「鲜度」难以保证。华为车 BU 董事长余承东曾表示,高精地图更新周期太长,赶不上高阶智能驾驶对更新频率的要求。华为在上海投入一两年,都没采集完城区高精地图。
高精地图每公里的采集成本高达上千元,是普通导航地图的数倍。
到了 2023 年,随着城市 NOA 军备竞赛的开启,越来越多车企开始强调:要摆脱对高精地图的依赖,「去图」的呼声日益高涨。
在程鹏看来,「去图化」趋势愈演愈烈的背后是「三无」危机感的体现——无地图资质、无知识产权以及无安全敬畏。他表示,一些宣称不依赖高精地图的车企,在遮住传感器后依然有地图信息,这说明其仍采用了地图方案。
这一火药味浓烈的回应,再次将智能驾驶能否摆脱高精地图的问题推到了风口浪尖。
在城市 NOA 大规模开城之际,地图该如何建立?智能驾驶又需要什么样的地图?
2021 年,特斯拉提出的 BEV+Transformer 方案,让「重感知、轻地图」的技术路径取代高精地图方案,逐步成为行业主流路线。
在这套算法模型下,理论上不需要高精地图,仅依靠摄像头、毫米波雷达等传感器,也能实时获取足够的道路信息。
不过,程鹏表示,「BEV+Transformer」本质上是摆脱激光雷达,能够用更为便宜的传感器实现智驾功能,而不是摆脱高精地图。地图能够做到的事情,这套算法模型做不到。比如高精地图作为一个超视距的先验传感器,可以提前获取车辆前方的道路信息及交通状况。
在他看来,无图方案将诞生三大难以逾越的难题:
合法合规难以保障,车辆传感器采集的部分道路数据属于敏感数据。
量产成本难以摊销,无图模式将进一步提升系统对传感器与高算力的依赖,智能驾驶的整体成本将变得高不可攀。
用户体验难以提升,即使在车辆上堆叠再多的传感器,在复杂路口也难以应对。
本质上,有图和无图的路线之争,缺少的是足够打动车企的高性价比地图方案。
轻量化地图产品 HD Lite 就是在这一背景下推出的。程鹏表示,「我们希望从这里面找到一个性价比最优、成本可控的平衡点。」
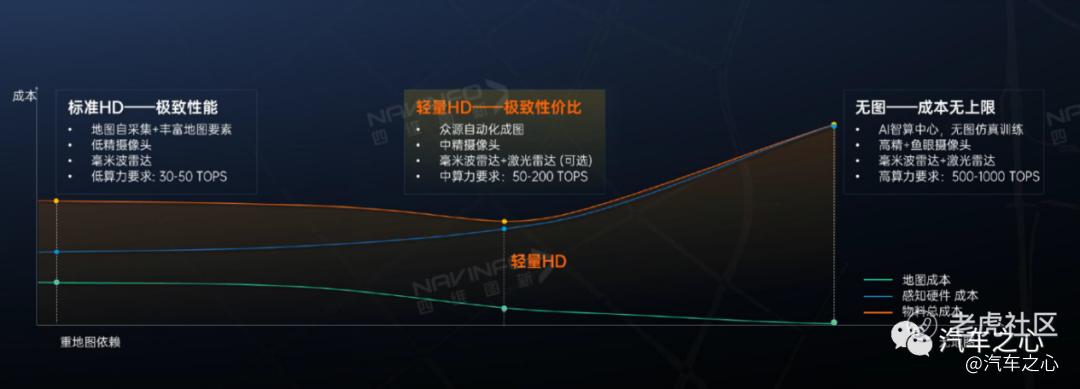
据了解,HD Lite 轻量化地图具有三大特点:
一是成本低,HD Lite 采购成本为四维图新此前推出产品(HD Pro)价格的一半。可以覆盖 120 个城市的公开车行道路,而且价格还可以随开通城市数量和定制要求浮动。
二是更新速度快,支持以「天」为单位的更新,保证高精地图的鲜度。
三是精度高,即使成本降低,高精地图的相对精度依然可达到 1 米。
总体来看,HD Lite 是四维图新面向追求极致性价比的城市 NOA 提出的地图解决方案。
从图商的角度看,现阶段高精地图依旧是智能驾驶能力攀升不可或缺的超视距传感器,同时也是让智能驾驶的体验实现越级提升的关键。
03 智能化,为什么是车企下半场最关键的战役?
对新能源汽车来说,上半场的竞争是电动化,硬件决定体验,目前大部分车企都完成了这一阶段。
智能化是下半场竞争的焦点,软件决定体验,汽车行业正在从制造属性过渡到消费属性+科技属性。
具体来说,智能化的核心——高阶智能驾驶,正在被传统品牌、新势力、ICT 巨头、互联网巨头群雄逐鹿,引发竞争格局加速洗牌。
在燃油车时代,车企与供应商的合作方式更像是买办关系,零件、功能和系统通通外购。这种模式我们称之为「全外包模式」。很大程度上,车企以集成各方技术为主,以用户品牌为主。
但这种标准化的「黑盒」交付模式,已经不能适应智能汽车时代的发展。车企更加希望能够掌控关键技术的 Know-How,从而推动产品功能的快速迭代,形成自己的数据闭环。
在这种背景下,一种全新的开发模式——全栈自研受到了新势力们的热捧。
在他们眼中,但凡影响用户体验的功能和产品,全都要自研。但全栈自研更考验车企的规模化能力与资金实力。
华为终端 BG CEO、智能汽车解决方案 BU 董事长余承东曾放言:规模和资金实力不够的车企,在智能化上全栈自研就是死路一条。
地平线副总裁李星宇则表示:「全栈自研是个奢侈品,从历史来看,真正拥有全栈能力并在商业上取得成功的公司绝对是少数,也是不可复制的极少数。」
于是第三种开发模式应运而生——全栈可控。
这里的全栈可控,指的是车企与供应商各取所长、互相成就。
在程鹏看来,车企进行全栈可控的优势有二:
全栈可控讲究专业分工,可以帮助车企释放更多精力在打磨产品差异化上。「今年大家都卷,其实卷的本质是产品趋于同质化,没有做好差异化,如果把差异化做好了,用户自愿会买单的。」程鹏指出。
全栈可控可以帮助车企降低开发成本,实现降本增效。「对车企来说,全栈自研是没办法实现盈亏平衡的。全栈可控是车企继续掌握自己的灵魂,掌握自己的用户。」

自今年年初以来,各大汽车品牌相继发起价格战,试图通过牺牲利润的方式换取市场。
在这种大环境下,智能驾驶的开发投入如何从一掷千金到细水长流,是一个非常值得思考的问题。
对车企而言,智能驾驶之路已经来到了至关重要的阶段。
从汽车的电动化到智能化,在经历了一轮洗牌后,整个汽车行业逐渐有从「春秋」进入「战国」之势。
而只有那些在智能化上打赢的车企,才有可能最终成为战国七雄之一。
这意味着,智能驾驶的渗透率需要持续提升,而极致性价比将成为推动智能驾驶普及的利器。
与此同时,具有技术优势的供应链企业,需要为车企解决现实痛点:降低智能驾驶研发成本,避免车企重复造轮子。而以四维图新为代表的产业链玩家,正在通过这种更为务实的方式,助力车企打赢智能化关键战役,获得下半场入场券。 $四维图新(002405)$
精彩评论